.png)
诚信、高效、团结、创新
诚信、高效、团结、创新
热烈祝贺实验室张瑞博士在国际无线通信领域顶级期刊《IEEE Transactions on Wireless Communications》成功发表论文《ISAC Empowered Air-Sea Collaborative System: A UAV-USV Joint Inspection Framework》!该期刊为中科院一区Top、JCR Q1分区,影响因子10.7,是无线通信与信息领域的国际顶级学术期刊。
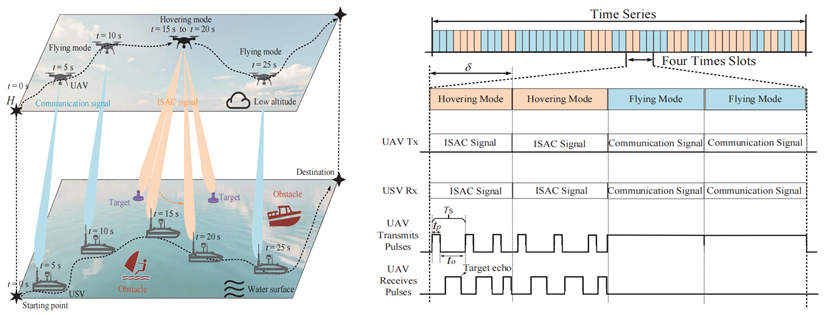
论文构建了一种基于集成感知与通信技术的海空协同系统框架,实现了无人机与无人艇在保持实时通信的同时协同完成目标检测任务。针对海空协同场景中无人机与无人艇轨迹耦合及平台异构性带来的挑战,研究采用悬停—飞行策略,在运动状态、感知性能及通信速率等约束条件下,建立了以系统总能耗最小化为目标的联合优化模型,对飞行轨迹、任务持续时间、目标调度及波束成形进行协同设计。为解决优化变量之间复杂的强耦合关系,进一步将原问题分解为悬停点选择以及联合轨迹规划与波束成形设计两个子问题。其中,悬停点选择问题被建模为一种新型带邻域的双旅行商问题。对于剩余的轨迹规划与波束成形设计问题,则在各悬停—飞行阶段分别采用半定松弛与逐次凸逼近方法进行高效求解。
通过解决海空协同系统中感知、通信与轨迹规划之间的资源耦合与协同优化问题,能够充分发挥无人机与无人艇协同平台的综合性能优势。这不仅有效提升了系统在复杂海洋环境中的任务执行效率与能源利用率,更重要的是,使海空异构平台能够在保持稳定实时通信的同时,动态协同完成高精度目标探测与巡检任务。该研究所构建的“感知—通信—协同”一体化框架,为未来智能无人系统在海洋监测、边海防巡检、灾害搜救及复杂环境自主作业等场景中的应用提供了重要理论基础与技术支撑,对于提升复杂环境下无人系统的自主协同能力、任务可靠性与整体作业效能具有重要意义。
编 辑 | 于 欣 欣