.png)
诚信、高效、团结、创新
热烈祝贺实验室潘峰博士在机器人领域顶级期刊IEEE Transactions on Robotics(T-RO)上发表学术论文!TRO主要发表代表机器人各方向重要前沿进展的高水平研究成果,涵盖机器人理论、算法、系统设计、实验验证、集成与应用等内容,该期刊为中科院一区Top、JCR Q1分区,影响因子为 10.5,是哈尔滨工程大学智能科学与工程学院认定的A类核心期刊,更是机器人与智能系统领域公认的国际顶级学术期刊。
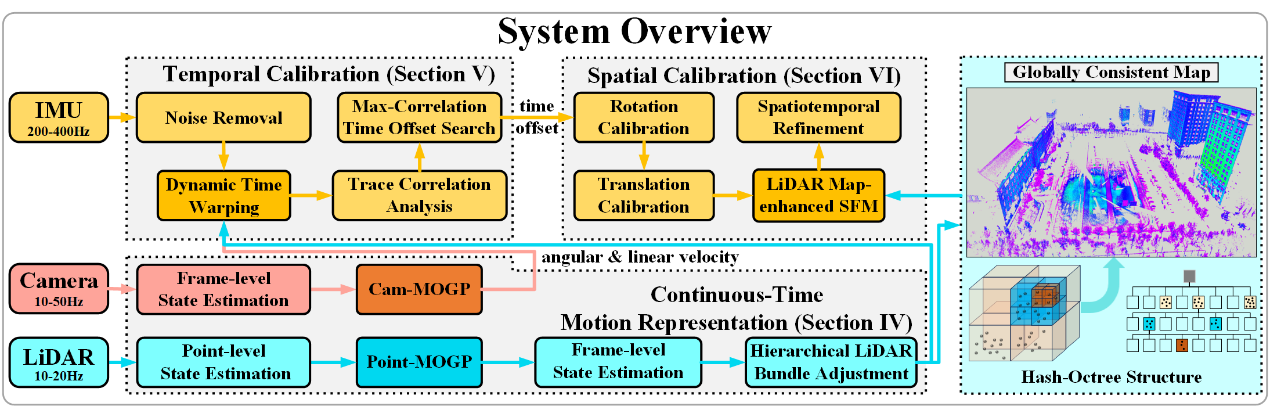
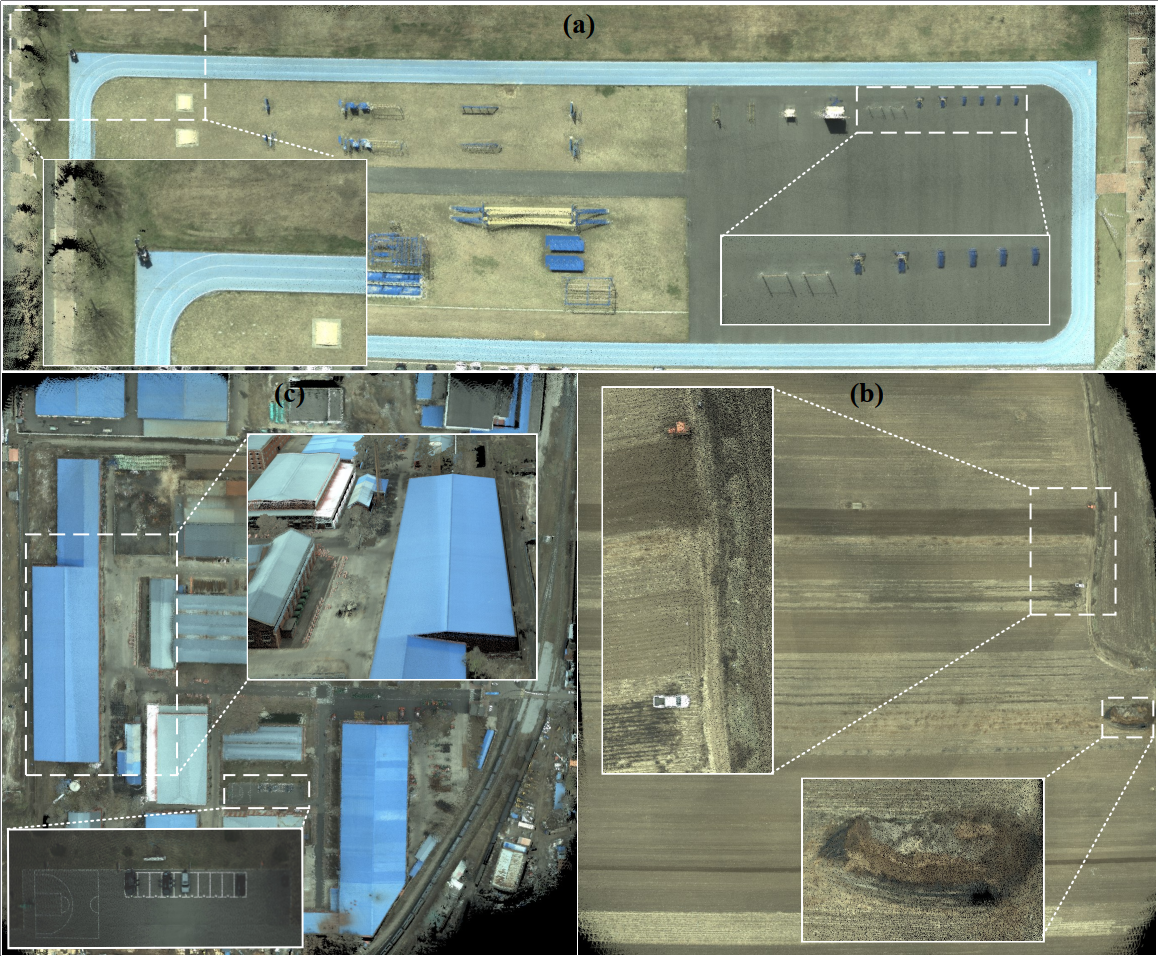
论文《M²-Calibr: Targetless Spatiotemporal Calibration for Multi-Sensor via Multi-Output Gaussian Processes》面向自动驾驶、移动机器人、无人机和三维重建等场景中 LiDAR、Camera、IMU 等多传感器系统的高精度融合需求,提出了一种基于多输出高斯过程的无靶标多传感器时空标定框架 M²-Calibr。针对不同传感器采样频率、观测模态和时间偏移不一致,以及快速运动下点云畸变和外参估计精度下降等问题,研究通过连续时间运动建模实现任意时刻传感器状态查询,提出 Point-MOGP 对激光雷达点级运动状态进行精细化校正,从源头减弱运动畸变,并结合动态时间规整(DTW)与轨迹相关性分析实现时间偏移的快速、稳健估计;同时利用高精度 LiDAR 地图辅助视觉尺度恢复,进一步提升相机与惯性传感器间的空间标定精度。大量公开数据集与自采数据实验表明,该方法在多 IMU-多相机、多 IMU-多 LiDAR 以及 IMU-LiDAR-Camera 联合系统中均取得了稳定可靠的标定效果,并能够支撑高质量彩色点云建图等下游任务。该研究为复杂环境下机器人多源感知、SLAM、三维重建和自主系统部署提供了更加灵活、高效、无需人工标定靶标的时空标定方案,对提升机器人多传感器融合系统的鲁棒性、自动化程度和实际应用能力具有重要意义。
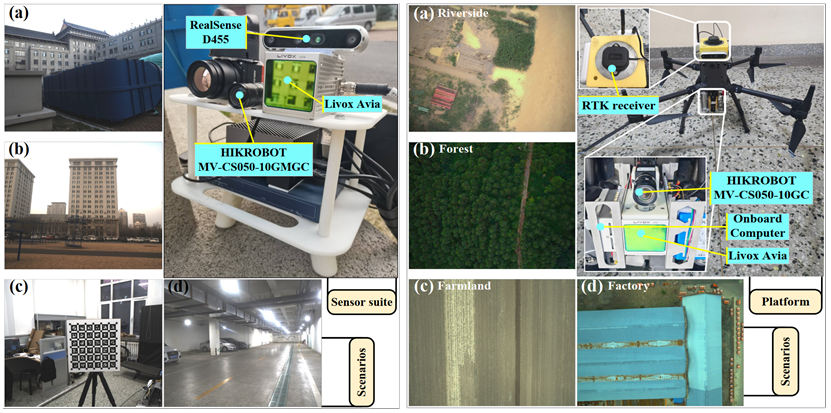
(特此感谢王路展硕士在数据采集上提供的帮助!)
编 辑 | 于 欣 欣